LUT based PMSM Control Reference
Generate lookup-table-based control reference currents for field-oriented control of permanent magnet synchronous motor
Since R2022b

Libraries:
Motor Control Blockset / Controls / Control Reference
Description
The LUT-Based PMSM Control Reference block generates the d-axis and q-axis reference currents for field-oriented control and field-weakening control of a permanent magnet synchronous motor (PMSM). You can specify reference torque and feedback mechanical speed and the block outputs the corresponding reference current values. The block also supports the maximum torque per ampere (MTPA) and maximum torque per voltage (MTPV) operating regions.
The block uses id(T,ω) and iq(T,ω) lookup tables (LUTs) to generate reference current values. Depending on the input method you use to specify the motor parameters, the block can either generate LUTs or use the data you provide.
You can use the Motor parameter input method parameter to specify one of these options.
Linear model with lumped parameters— The block uses lumped parameters with Ld, Lq, and FluxPM.This option uses the lumped parameters to compute the id and iq LUTs. The block obtains id and iq for the given ω and T inputs by solving the equations associated with these curves.
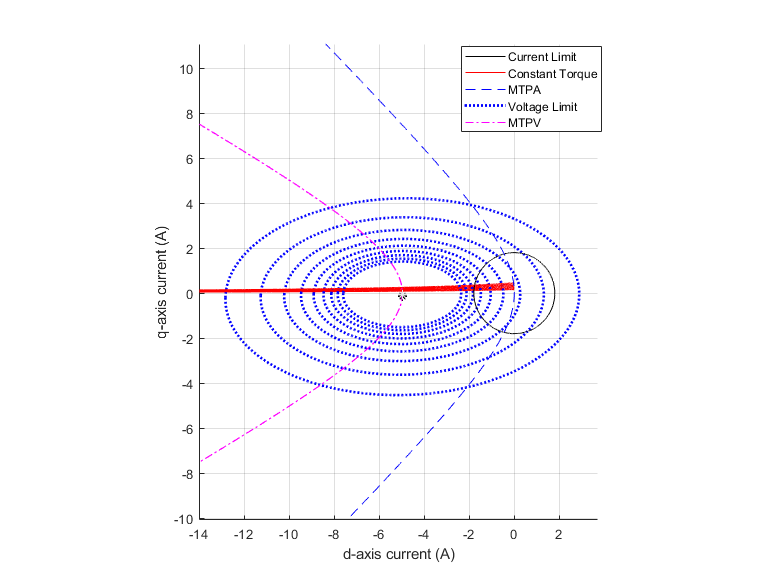
Maximum torque per ampere (MTPA) curve (IPMSM),
MTPA line (SPMSM), id = 0.
Constant torque trajectory
Current limit curve
Voltage limit curve
When the motor is operating within the voltage constraints, the block solves for the intersection of the MTPA line and the constant torque trajectory.
When the motor is operating beyond the voltage constraints, the block solves for the intersection of the voltage constraint curve and the constant torque trajectory.
After computing the id and iq tables from a grid of ω and T values, the block uses interpolation to find idref and iqref for any ω and T inputs that lie within the range of the table values. The table values are clipped for ω and T values beyond the boundaries.
Non-linear model with Ld, Lq, and FluxPM LUTs— The block uses a nonlinear model with d-axis and q-axis stator winding inductances and permanent magnet flux linkage lookup tablesThis option uses an approach similar to the lumped parameters method, except that the block updates the values for Ld(id,iq), Lq(id,iq), and FluxPM(id,iq) each time it computes id and iq. The block iterates these computations until the id and iq values converge.
Non-linear model with D,Q-flux linkage LUTs— The block uses a nonlinear model with d-axis and q-axis flux linkage lookup tablesThis option uses an approach similar to the lumped parameters method, except that the block updates the values for ψd(id,iq) and ψq(id,iq) each time it computes id and iq . The block iterates these computations until the id and iq values converge.
Non-linear model with id and iq LUTs— Use this option when you want to manually provide the id(T,ω) and iq(T,ω) tables. Typically, you obtain these tables through simulations or dyno tests.
You can also generate these tables using the mcb.generateMotorLUT
function in Motor Control Blockset™.
In addition, you can use the Vdc input method parameter to configure the block to accept a fixed reference DC voltage through the DC voltage to compute LUTs (V) parameter or a variable reference DC voltage through a separate input port Vdc.
Your choice of settings determines the technique that the block uses to compute reference currents.
| Motor parameter input method | Vdc input method | Technique |
|---|---|---|
Linear model with lumped parameters | Specify via dialog | The block uses the lumped parameters to compute the id and iq LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter, using which it determines the reference currents. |
Input port - use 3D LUT (voltage slice
based) | The block uses the lumped parameters to compute the 3-D id and iq LUTs containing data for different voltages (or voltage slices specified in the DC bus voltage breakpoint vector, Vdc (V) parameter). It uses this data to determine the reference currents corresponding to the voltage specified at the input port Vdc. | |
Input port - use 2D LUT (scaled-w
based) | The block uses the lumped parameters to compute the 2-D id and iq LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. It uses these LUTs to compute the reference currents (corresponding to the voltage provided at the input port Vdc) by scaling the speed (ω). | |
Non-linear model with D,Q-flux linkage
LUTs | Specify via dialog | The block computes the reference currents by using the d-axis and q-axis flux linkage LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. |
Input port - use 3D LUT (voltage slice
based) | The block uses the 3-D d-axis and q-axis flux linkage LUTs containing data for different voltages (or voltage slices specified in the DC bus voltage breakpoint vector, Vdc (V) parameter). It uses these LUTs to compute the reference currents corresponding to the voltage provided at the input port Vdc. | |
Input port - use 2D LUT (scaled-w
based) | The block uses the 2-D d-axis and q-axis flux linkage LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. It uses these LUTs to compute the reference currents (corresponding to the voltage provided at the input port Vdc) by scaling the speed (ω). | |
Non-linear model with Ld, Lq, and FluxPM
LUTs | Specify via dialog | The block computes the reference currents by using the given Ld, Lq, and permanent magnet flux linkage LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. |
Input port - use 3D LUT (voltage slice
based) | The block uses the given 3-D Ld, Lq, and permanent magnet flux linkage LUTs containing data for different voltages (or voltage slices specified in the DC bus voltage breakpoint vector, Vdc (V) parameter). It uses these LUTs to compute the reference currents corresponding to the voltage provided at the input port Vdc. | |
Input port - use 2D LUT (scaled-w
based) | The block uses the given 2-D Ld, Lq, and permanent magnet flux linkage LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. It uses these LUTs to compute the reference currents (corresponding to the voltage provided at the input port Vdc) by scaling the speed (ω). | |
Non-linear model with id and iq
LUTs | Specify via dialog | The block determines the reference currents by using the given id, iq LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. |
Input port - use 3D LUT (voltage slice
based) | The block uses the given 3-D id, iq LUTs containing data for different voltages (or voltage slices specified in the DC bus voltage breakpoint vector, Vdc (V) parameter). It uses these LUTs to determine the reference currents corresponding to the voltage provided at the input port Vdc. | |
Input port - use 2D LUT (scaled-w
based) | The block uses the given 2-D id, iq LUTs for a fixed voltage specified in the DC bus voltage, Vdc (V) parameter. It uses these LUTs to compute the reference currents (corresponding to the voltage provided at the input port Vdc) by scaling the speed (ω). |
For a detailed set of equations and assumptions that Motor Control Blockset uses for a PMSM, see Mathematical Model of PMSM.
Examples
PMSM Drive Characteristics and Constraint Curves
Uses Motor Control Blockset™ to show how to use the PMSM characteristic plotting and PMSM milestone speed identification functions to obtain a control trajectory.

Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
Uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2022b