Signal Enhancement Using LMS and NLMS Algorithms
Using the least mean square (LMS) and normalized LMS algorithms, extract the desired signal from a noise-corrupted signal by filtering out the noise. Both these algorithms are available with the dsp.LMSFilter System object™.
Create the Signals for Adaptation
The desired signal (the output from the process) is a sinusoid with 1000 samples per frame.
sine = dsp.SineWave('Frequency',375,'SampleRate',8000,'SamplesPerFrame',1000)
sine =
dsp.SineWave with properties:
Amplitude: 1
Frequency: 375
PhaseOffset: 0
ComplexOutput: false
Method: 'Trigonometric function'
SamplesPerFrame: 1000
SampleRate: 8000
OutputDataType: 'double'
s = sine();
To perform adaptation, the filter requires two signals:
A reference signal
A noisy signal that contains both the desired signal and an added noise component
Generate the Noise Signal
Create a noise signal with autoregressive noise (defined as v1). In autoregressive noise, the noise at time t depends only on the previous values and a random disturbance.
v = 0.8*randn(sine.SamplesPerFrame,1); % Random noise part. ar = [1,1/2]; % Autoregression coefficients. ARfilt = dsp.IIRFilter('Numerator',1,'Denominator',ar)
ARfilt =
dsp.IIRFilter with properties:
Structure: 'Direct form II transposed'
Numerator: 1
Denominator: [1 0.5000]
InitialConditions: 0
Show all properties
v1 = ARfilt(v);
Corrupt the Desired Signal to Create a Noisy Signal
To generate the noisy signal that contains both the desired signal and the noise, add the noise signal v1 to the desired signal s. The noise-corrupted sinusoid x is:
x = s + v1;
Adaptive filter processing seeks to recover s from x by removing v1. To complete the signals needed to perform adaptive filtering, the adaptation process requires a reference signal.
Create a Reference Signal
Define a moving average signal v2 that is correlated with v1. The signal v2 is the reference signal for this example.
ma = [1, -0.8, 0.4, -0.2];
MAfilt = dsp.FIRFilter('Numerator',ma)MAfilt =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [1 -0.8000 0.4000 -0.2000]
InitialConditions: 0
Show all properties
v2 = MAfilt(v);
Construct Two Adaptive Filters
Two similar, sixth-order adaptive filters — LMS and NLMS — form the basis of this example. Set the order as a variable in MATLAB™ and create the filters.
L = 7; lms = dsp.LMSFilter(L,'Method','LMS')
lms =
dsp.LMSFilter with properties:
Method: 'LMS'
Length: 7
StepSizeSource: 'Property'
StepSize: 0.1000
LeakageFactor: 1
InitialConditions: 0
AdaptInputPort: false
WeightsResetInputPort: false
WeightsOutput: 'Last'
Show all properties
nlms = dsp.LMSFilter(L,'Method','Normalized LMS')
nlms =
dsp.LMSFilter with properties:
Method: 'Normalized LMS'
Length: 7
StepSizeSource: 'Property'
StepSize: 0.1000
LeakageFactor: 1
InitialConditions: 0
AdaptInputPort: false
WeightsResetInputPort: false
WeightsOutput: 'Last'
Show all properties
Choose the Step Size
LMS-like algorithms have a step size that determines the amount of correction applied as the filter adapts from one iteration to the next. A step size that is too small increases the time for the filter to converge on a set of coefficients. A step size that is too large might cause the adapting filter to diverge and never reach convergence. In this case, the resulting filter might not be stable.
As a rule of thumb, smaller step sizes improve the accuracy with which the filter converges to match the characteristics of the unknown system, at the expense of the time it takes to adapt.
The maxstep function of dsp.LMSFilter object determines the maximum step size suitable for each LMS adaptive filter algorithm that ensures that the filter converges to a solution. Often, the notation for the step size is µ.
[mumaxlms,mumaxmselms] = maxstep(lms,x)
mumaxlms = 0.2127
mumaxmselms = 0.1312
[mumaxnlms,mumaxmsenlms] = maxstep(nlms,x)
mumaxnlms = 2
mumaxmsenlms = 2
Set the Adapting Filter Step Size
The first output of the maxstep function is the value needed for the mean of the coefficients to converge, while the second output is the value needed for the mean squared coefficients to converge. Choosing a large step size often causes large variations from the convergence values, so generally choose smaller step sizes.
lms.StepSize = mumaxmselms/30
lms =
dsp.LMSFilter with properties:
Method: 'LMS'
Length: 7
StepSizeSource: 'Property'
StepSize: 0.0044
LeakageFactor: 1
InitialConditions: 0
AdaptInputPort: false
WeightsResetInputPort: false
WeightsOutput: 'Last'
Show all properties
nlms.StepSize = mumaxmsenlms/20
nlms =
dsp.LMSFilter with properties:
Method: 'Normalized LMS'
Length: 7
StepSizeSource: 'Property'
StepSize: 0.1000
LeakageFactor: 1
InitialConditions: 0
AdaptInputPort: false
WeightsResetInputPort: false
WeightsOutput: 'Last'
Show all properties
Filter with the Adaptive Filters
You have set up the parameters of the adaptive filters and are now ready to filter the noisy signal. The reference signal v2 is the input to the adaptive filters. x is the desired signal in this configuration.
Through adaptation, y, the output of the filters, tries to emulate x as closely as possible.
Since v2 is correlated only with the noise component v1 of x, it can only really emulate v1. The error signal (the desired x), minus the actual output y, constitutes an estimate of the part of x that is not correlated with v2 — s, the signal to extract from x.
[~,elms,wlms] = lms(v2,x); [~,enlms,wnlms] = nlms(v2,x);
Compute the Optimal Solution
For comparison, compute the optimal FIR Wiener filter.
reset(MAfilt); bw = firwiener(L-1,v2,x); % Optimal FIR Wiener filter MAfilt = dsp.FIRFilter('Numerator',bw)
MAfilt =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [1.0001 0.3060 0.1050 0.0482 0.1360 0.0959 0.0477]
InitialConditions: 0
Show all properties
yw = MAfilt(v2); % Estimate of x using Wiener filter ew = x - yw; % Estimate of actual sinusoid
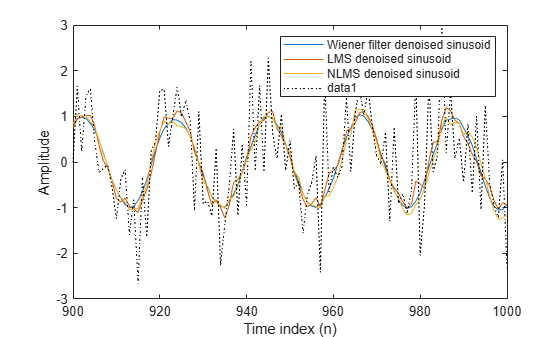
Plot the Results
Plot the resulting denoised sinusoid for each filter — the Wiener filter, the LMS adaptive filter, and the NLMS adaptive filter — to compare the performance of the various techniques.
n = (1:1000)'; plot(n(900:end),[ew(900:end), elms(900:end),enlms(900:end)]) legend('Wiener filter denoised sinusoid',... 'LMS denoised sinusoid','NLMS denoised sinusoid') xlabel('Time index (n)') ylabel('Amplitude')
As a reference point, include the noisy signal as a dotted line in the plot.
hold on plot(n(900:end),x(900:end),'k:') xlabel('Time index (n)') ylabel('Amplitude') hold off
Compare the Final Coefficients
Finally, compare the Wiener filter coefficients with the coefficients of the adaptive filters. While adapting, the adaptive filters try to converge to the Wiener coefficients.
[bw.' wlms wnlms]
ans = 7×3
1.0001 0.8644 0.9690
0.3060 0.1198 0.2661
0.1050 -0.0020 0.1226
0.0482 -0.0046 0.1074
0.1360 0.0680 0.2210
0.0959 0.0214 0.1940
0.0477 0.0292 0.1127
Reset the Filter Before Filtering
You can reset the internal filter states at any time by calling the reset function on the filter object.
For instance, these successive calls produce the same output after resetting the object.
[ylms,elms,wlms] = lms(v2,x); [ynlms,enlms,wnlms] = nlms(v2,x);
If you do not reset the filter object, the filter uses the final states and coefficients from the previous run as the initial conditions and data set for the next run.
Investigate Convergence Through Learning Curves
To analyze the convergence of the adaptive filters, use the learning curves. The toolbox provides methods to generate the learning curves, but you need more than one iteration of the experiment to obtain significant results.
This demonstration uses 25 sample realizations of the noisy sinusoids.
reset(ARfilt) reset(sine); release(sine); n = (1:5000)'; sine.SamplesPerFrame = 5000
sine =
dsp.SineWave with properties:
Amplitude: 1
Frequency: 375
PhaseOffset: 0
ComplexOutput: false
Method: 'Trigonometric function'
SamplesPerFrame: 5000
SampleRate: 8000
OutputDataType: 'double'
s = sine(); nr = 25; v = 0.8*randn(sine.SamplesPerFrame,nr); ARfilt = dsp.IIRFilter('Numerator',1,'Denominator',ar)
ARfilt =
dsp.IIRFilter with properties:
Structure: 'Direct form II transposed'
Numerator: 1
Denominator: [1 0.5000]
InitialConditions: 0
Show all properties
v1 = ARfilt(v);
x = repmat(s,1,nr) + v1;
reset(MAfilt);
MAfilt = dsp.FIRFilter('Numerator',ma)MAfilt =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [1 -0.8000 0.4000 -0.2000]
InitialConditions: 0
Show all properties
v2 = MAfilt(v);
Compute the Learning Curves
Now compute mean squared error. To speed things up, compute the error every 10 samples.
First, reset the adaptive filters to avoid using the coefficients it has already computed and the states it has stored. Then plot the learning curves for the LMS and NLMS adaptive filters.
reset(lms); reset(nlms); M = 10; % Decimation factor mselms = msesim(lms,v2,x,M); msenlms = msesim(nlms,v2,x,M); plot(1:M:n(end),mselms,'b',1:M:n(end),msenlms,'g') legend('LMS learning curve','NLMS learning curve') xlabel('Time index (n)') ylabel('MSE')
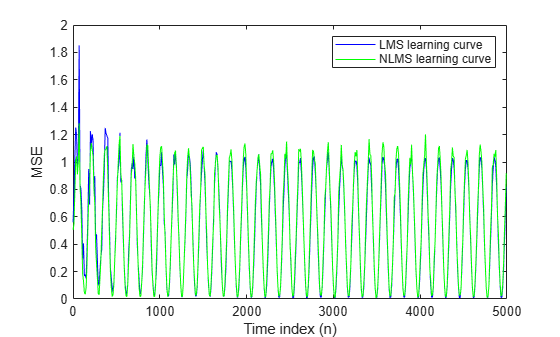
In this plot you see the calculated learning curves for the LMS and NLMS adaptive filters.
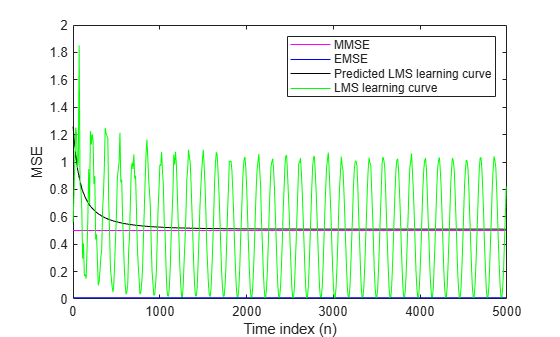
Compute the Theoretical Learning Curves
For the LMS and NLMS algorithms, functions in the toolbox help you compute the theoretical learning curves, along with the minimum mean squared error (MMSE), the excess mean squared error (EMSE), and the mean value of the coefficients.
MATLAB might take some time to calculate the curves. The figure shown after the code plots the predicted and actual LMS curves.
reset(lms); [mmselms,emselms,meanwlms,pmselms] = msepred(lms,v2,x,M); x = 1:M:n(end); y1 = mmselms*ones(500,1); y2 = emselms*ones(500,1); y3 = pmselms; y4 = mselms; plot(x,y1,'m',x,y2,'b',x,y3,'k',x,y4,'g') legend('MMSE','EMSE','Predicted LMS learning curve',... 'LMS learning curve') xlabel('Time index (n)') ylabel('MSE')