TuningGoal.Margins
Stability margin requirement for control system tuning
Description
Use TuningGoal.Margins to specify a tuning
goal for the gain and phase margins of a SISO or MIMO feedback loop. You can use this
tuning goal for validating a tuned control system with viewGoal. You
can also use the tuning goal for control system tuning with tuning commands such as
systune or looptune.
After you create a tuning goal, you can configure it further by setting Properties of the object.
After using the tuning goal to tune a control system, you can visualize the tuning
goal and the tuned value using the viewGoal command. For information about interpreting the margins goal,
see Stability Margins in Control System Tuning.
Creation
Description
Req =
TuningGoal.Margins(location,gainmargin,phasemargin)
Input Arguments
Properties
Examples
SISO Margin Requirement Evaluated with Additional Loop Opening
Create a margin requirement for the inner loop of the following control system. The requirement imposes a minimum gain margin of 5 dB and a minimum phase margin of 40 degrees.
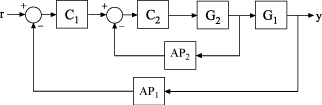
Create a model of the system. To do so, specify and connect the numeric plant models G1 and G2, and the tunable controllers C1 and C2. Also specify and connect the AnalysisPoint blocks AP1 and AP2 that mark points of interest for analysis and tuning.
G1 = tf(10,[1 10]); G2 = tf([1 2],[1 0.2 10]); C1 = tunablePID('C','pi'); C2 = tunableGain('G',1); AP1 = AnalysisPoint('AP1'); AP2 = AnalysisPoint('AP2'); T = feedback(G1*feedback(G2*C2,AP2)*C1,AP1);
Create a tuning requirement object.
Req = TuningGoal.Margins('AP2',5,40);This requirement imposes the specified stability margins on the feedback loop identified by the AnalysisPoint channel 'AP2', which is the inner loop.
Specify that these margins are evaluated with the outer loop of the control system open.
Req.Openings = {'AP1'};Adding 'AP1' to the Openings property of the tuning requirements object ensures that systune evaluates the requirement with the loop open at that location.
Use systune to tune the free parameters of T to meet the tuning requirement specified by Req. You can then use viewGoal to validate the tuned control system against the requirement.
MIMO Margin Requirement in Frequency Band
Create a requirement that sets minimum gain and phase margins for the loop defined by three loop-opening locations in a control system to tune. Because this loop is defined by three loop-opening locations, it is a MIMO loop.
The requirement sets a minimum gain margin of 10 dB and a minimum phase margin of 40 degrees, within the band between 0.1 and 10 rad/s.
Req = TuningGoal.Margins({'r','theta','phi'},10,40);The names 'r', 'theta', and 'phi' must specify valid loop-opening locations in the control system that you are tuning.
Limit the requirement to the frequency band between 0.1 and 10 rad/s.
Req.Focus = [0.1 10];
Tips
This tuning goal imposes an implicit stability constraint on the closed-loop sensitivity function measured at
Location, evaluated with loops opened at the points identified inOpenings. The dynamics affected by this implicit constraint are the stabilized dynamics for this tuning goal. TheMinDecayandMaxRadiusoptions ofsystuneOptionscontrol the bounds on these implicitly constrained dynamics. If the optimization fails to meet the default bounds, or if the default bounds conflict with other requirements, usesystuneOptionsto change these defaults.
Algorithms
When you tune a control system using a TuningGoal, the software
converts the tuning goal into a normalized scalar value
f(x), where x is the vector
of free (tunable) parameters in the control system. The software then adjusts the
parameter values to minimize f(x) or to drive
f(x) below 1 if the tuning goal is a hard
constraint.
For TuningGoal.Margins, f(x)
is given by:
S = D–1[I – L(s,x)]–1D is the scaled sensitivity function.
L(s,x) is the open-loop response being shaped.
D is an automatically-computed loop scaling factor. For more information about D, see Stability Margins in Control System Tuning.
α is a scalar parameter computed from the specified gain and phase margin. For more information about α, see Stability Analysis Using Disk Margins (Robust Control Toolbox).
Version History
Introduced in R2016aSee Also
looptune | systune | systune (for slTuner) (Simulink Control Design) | looptune (for slTuner) (Simulink Control Design) | viewGoal | evalGoal
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)