passiveplot
Compute or plot passivity index as function of frequency
Syntax
Description
passiveplot( plots
the relative passivity indices of the dynamic system G)G as
a function of frequency. When I + G is minimum
phase, the relative passivity indices are the singular values of (I
- G)(I + G)^-1. The largest singular value measures the
relative excess (R < 1) or shortage (R
> 1) at each frequency. See getPassiveIndex for
more information about the meaning of the passivity index.
passiveplot automatically chooses the frequency
range and number of points for the plot based on the dynamics of G.
If G is a model with complex coefficients, then
in:
Log frequency scale, the plot shows two branches, one for positive frequencies and one for negative frequencies. The arrows indicate the direction of increasing frequency values for each branch.
Linear frequency scale, the plot shows a single branch with a symmetric frequency range centered at a frequency value of zero.
passiveplot(___, plots
the passivity index for frequencies specified by w)w.
If
wis a cell array of the form{wmin,wmax}, thenpassiveplotplots the passivity index at frequencies ranging betweenwminandwmax.If
wis a vector of frequencies, thenpassiveplotplots the passivity index at each specified frequency. The vectorwcan contain both negative and positive frequencies.
You can use this syntax with any of the previous input-argument combinations.
passiveplot(G1,
specifies a color, linestyle, and marker for each system in the plot.LineSpec1,...,GN,LineSpecN,___)
passiveplot(___,
plots the passivity index with the options set specified in
plotoptions)plotoptions. You can use these options to customize the
plot appearance using the command line. Settings you specify in
plotoptions override the preference settings in the
MATLAB® session in which you run passiveplot.
Therefore, this syntax is useful when you want to write a script to generate
multiple plots that look the same regardless of the local preferences.
Examples
Plot Passivity Versus Frequency
Plot the relative passivity index as a function of frequency of the system .
G = tf([1 2],[1 1]); passiveplot(G)
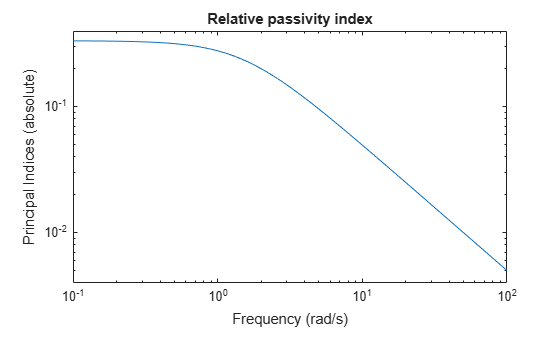
The plot shows that the relative passivity index is less than 1 at all frequencies. Therefore, the system G is passive.
Plot the input passivity index of the same system.
passiveplot(G,'input')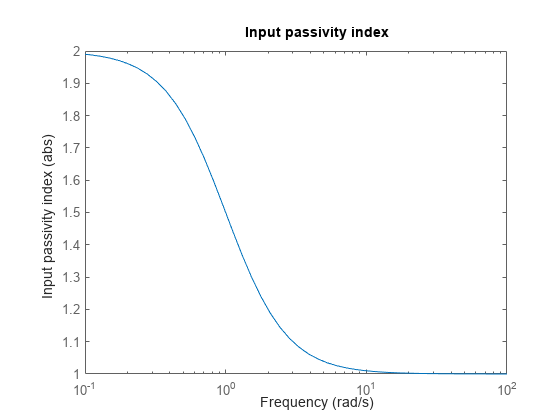
The input passivity index is positive at all frequencies. Therefore, the system is input strictly passive.
Plot Passivity of Multiple Systems
Plot the input passivity index of two dynamic systems and their series interconnection.
G1 = tf([5 3 1],[1 2 1]); G2 = tf([1 1 5 0.1],[1 2 3 4]); H = G2*G1; passiveplot(G1,'r',G2,'b--',H,'gx','input') legend('G1','G2','G2*G1')
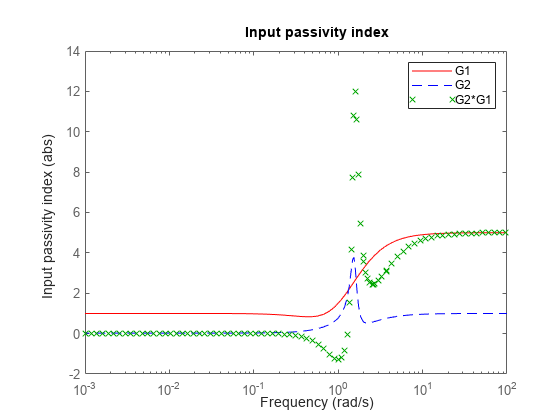
The input passivity index of the interconnected system dips below 0 around 1 rad/s. This plot shows that the series interconnection of two passive systems is not necessarily passive. However, passivity is preserved for parallel or feedback interconnections of passive systems.
Plot Passivity of Models with Complex Coefficients
Plot the relative passivity indices of a complex-coefficient model and a real-coefficient model on the same plot.
A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = tf([1 5 10],[1 10 5]); passiveplot(Gc,Gr) legend('Complex-coefficient model','Real-coefficient model','Location','southeast')
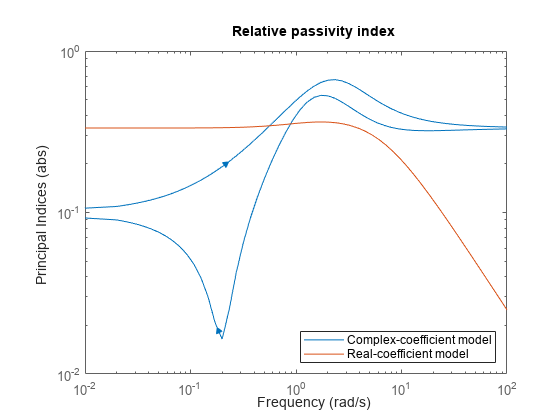
In log frequency scale, the plot shows two branches for models with complex coefficients, one for positive frequencies, with a right-pointing arrow, and one for negative frequencies, with a left-pointing arrow. In both branches, the arrows indicate the direction of increasing frequencies. The plots for models with real coefficients always contain a single branch with no arrows.
Set the plotting frequency scale to linear.
opt = sectorplotoptions;
opt.FreqScale = 'Linear';Plot the indices.
passiveplot(Gc,Gr,opt) legend('Complex-coefficient model','Real-coefficient model')
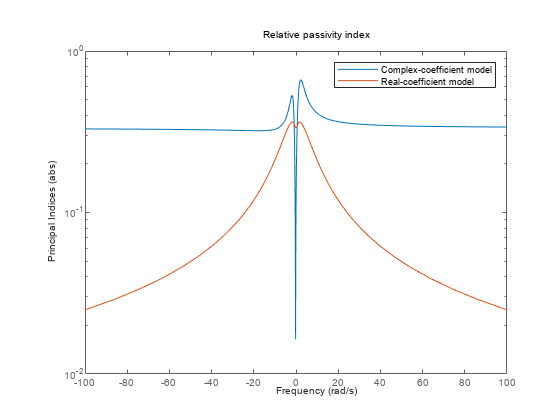
In linear frequency scale, the plots show a single branch with a symmetric frequency range centered at a frequency value of zero. The plot also shows the negative-frequency response of a real-coefficient model when you plot the response along with a complex-coefficient model.
Input Arguments
Output Arguments
Version History
Introduced in R2016a
See Also
isPassive | getPassiveIndex | getSectorIndex | sectorplot | sectorplotoptions
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)