nichols
Nichols chart of frequency response
Syntax
Description
nichols( creates a Nichols chart of the
frequency response of a dynamic system model
sys)sys. The plot displays the magnitude (in dB) and phase (in degrees)
of the system response as a function of frequency. nichols
automatically determines frequencies to plot based on system dynamics. Use ngrid to superimpose Nichols chart grid lines on an existing SISO Nichols
chart.
If sys is a multi-input, multi-output (MIMO) model, then
nichols produces an array of Nichols charts, each plot showing the
frequency response of one I/O pair.
If sys is a model with complex coefficients, then
nichols plot shows a contour comprised of both positive and
negative frequencies. For models with real coefficients, nichols only
shows positive frequencies.
nichols(___, plots the
response for frequencies specified by w)w.
If
wis a cell array of the form{wmin,wmax}, thennicholsplots the chart at frequencies ranging betweenwminandwmax.If
wis a vector of frequencies, thennicholsplots the chart at each specified frequency. The vectorwcan contain both negative and positive frequencies.
You can use w with any of the input-argument combinations in
previous syntaxes.
Examples
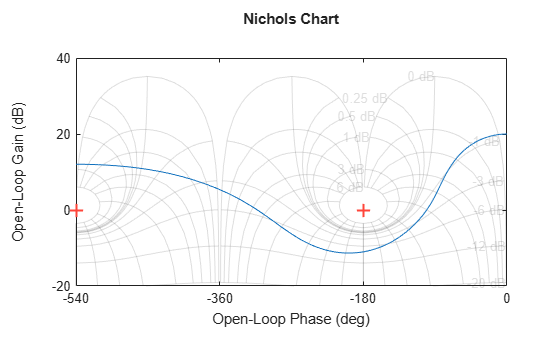
Nichols Response with Nichols Grid Lines
Plot the Nichols response with Nichols grid lines for the following system:
H = tf([-4 48 -18 250 600],[1 30 282 525 60]); nichols(H) ngrid
Nichols Plot at Specified Frequencies
Create a Nichols plot over a specified frequency range. Use this approach when you want to focus on the dynamics in a particular range of frequencies.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
nichols(H,{1,100})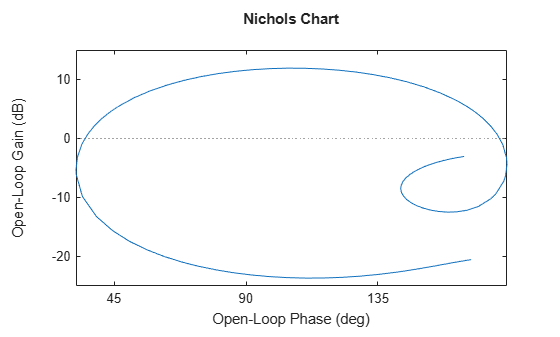
The cell array {1,100} specifies the minimum and maximum frequency values in the Nichols plot. When you provide frequency bounds in this way, the function selects intermediate points for frequency response data.
Alternatively, specify a vector of frequency points to use for evaluating and plotting the frequency response.
w = 1:0.5:100;
nichols(H,w,'.-')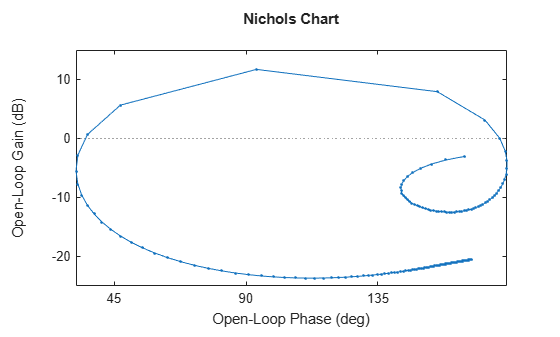
nichols plots the frequency response at the specified frequencies only.
Nichols Plot of Several Dynamic Systems
Compare the frequency response of a continuous-time system to an equivalent discretized system on the same Nichols plot.
Create continuous-time and discrete-time dynamic systems.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');Create a Nichols plot that displays both systems.
nichols(H,Hd)
Nichols Plot with Specified Line Attributes
Specify the line style, color, or marker for each system in a Nichols plot using the LineSpec input argument.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); nichols(H,'r',Hd,'b--')
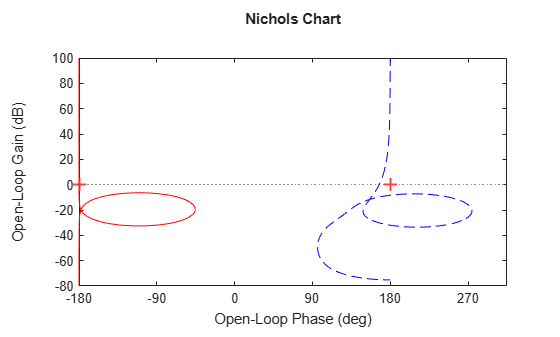
The first LineSpec, 'r', specifies a solid red line for the response of H. The second LineSpec, 'b--', specifies a dashed blue line for the response of Hd.
Nichols Response Magnitude and Phase Data
Compute the magnitude and phase of the frequency response of a SISO system.
If you do not specify frequencies, nichols chooses frequencies based on the system dynamics and returns them in the third output argument.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); [mag,phase,wout] = nichols(H);
Because H is a SISO model, the first two dimensions of mag and phase are both 1. The third dimension is the number of frequencies in wout.
size(mag)
ans = 1×3
1 1 110
length(wout)
ans = 110
Thus, each entry along the third dimension of mag gives the magnitude of the response at the corresponding frequency in wout.
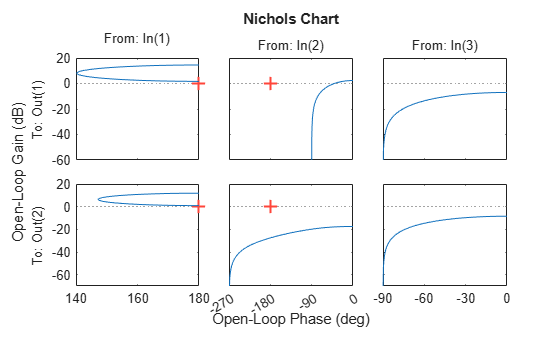
Nichols Plot of MIMO System
For this example, create a 2-output, 3-input system.
rng(0,'twister');
H = rss(4,2,3);For this system, nichols plots the frequency responses of each I/O channel in a separate plot in a single figure.
nichols(H)
Compute the magnitude and phase of these responses at 20 frequencies between 1 and 10 radians.
w = logspace(0,1,20); [mag,phase] = nichols(H,w);
mag and phase are three-dimensional arrays, in which the first two dimensions correspond to the output and input dimensions of H, and the third dimension is the number of frequencies. For instance, examine the dimensions of mag.
size(mag)
ans = 1×3
2 3 20
Thus, for example, mag(1,3,10) is the magnitude of the response from the third input to the first output, computed at the 10th frequency in w. Similarly, phase(1,3,10) contains the phase of the same response.
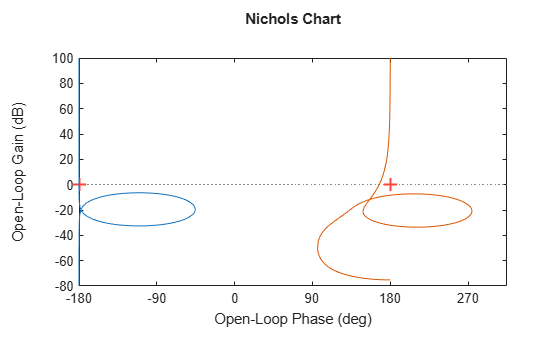
Nichols Plot of Model with Complex Coefficients
Create a Nichols plot of a model with complex coefficients and a model with real coefficients on the same plot.
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(7); nichols(Gc,Gr) legend('Complex-coefficient model','Real-coefficient model','Location','southwest')
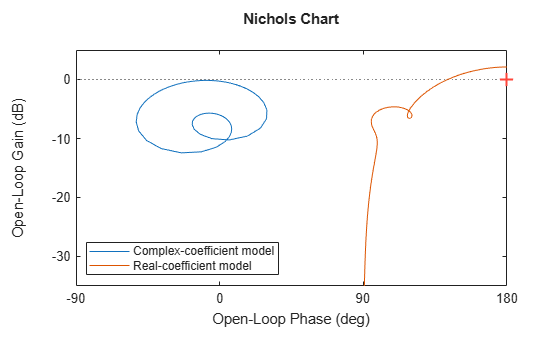
For models with complex coefficients, nichols shows a contour comprised of both positive and negative frequencies. For models with real coefficients, the plot shows only positive frequencies, even when complex-coefficient models are present. You can click the curve to further examine which section and values correspond to positive and negative frequencies.
Input Arguments
Output Arguments
Tips
When you need additional plot customization options, use
nicholsplotinstead.
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)