shortestpath
Shortest path between two single nodes
Syntax
Description
P = shortestpath(G,s,t)s and ending
at target node t. If the graph is weighted (that is,
G.Edges contains a variable Weight), then
those weights are used as the distances along the edges in the graph. Otherwise, all
edge distances are taken to be 1.
Examples
Create and plot a directed graph.
s = [1 1 2 3 3 4 4 6 6 7 8 7 5]; t = [2 3 4 4 5 5 6 1 8 1 3 2 8]; G = digraph(s,t); plot(G)
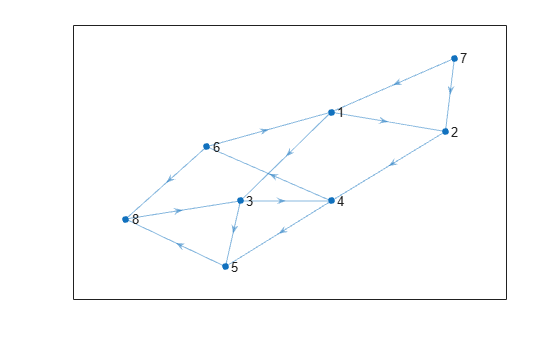
Calculate the shortest path between nodes 7 and 8.
P = shortestpath(G,7,8)
P = 1×5
7 1 3 5 8
Create and plot a graph with weighted edges.
s = [1 1 1 2 2 6 6 7 7 3 3 9 9 4 4 11 11 8];
t = [2 3 4 5 6 7 8 5 8 9 10 5 10 11 12 10 12 12];
weights = [10 10 10 10 10 1 1 1 1 1 1 1 1 1 1 1 1 1];
G = graph(s,t,weights);
plot(G,'EdgeLabel',G.Edges.Weight)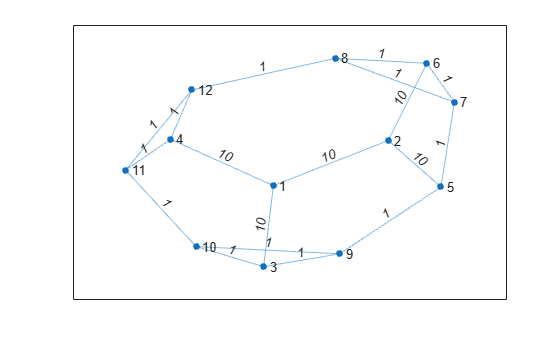
Find the shortest path between nodes 3 and 8, and specify two outputs to also return the length of the path.
[P,d] = shortestpath(G,3,8)
P = 1×5
3 9 5 7 8
d = 4
Since the edges in the center of the graph have large weights, the shortest path between nodes 3 and 8 goes around the boundary of the graph where the edge weights are smallest. This path has a total length of 4.
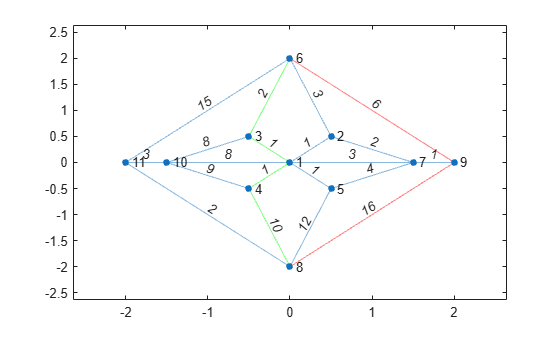
Create and plot a graph with weighted edges, using custom node coordinates.
s = [1 1 1 1 1 2 2 7 7 9 3 3 1 4 10 8 4 5 6 8]; t = [2 3 4 5 7 6 7 5 9 6 6 10 10 10 11 11 8 8 11 9]; weights = [1 1 1 1 3 3 2 4 1 6 2 8 8 9 3 2 10 12 15 16]; G = graph(s,t,weights); x = [0 0.5 -0.5 -0.5 0.5 0 1.5 0 2 -1.5 -2]; y = [0 0.5 0.5 -0.5 -0.5 2 0 -2 0 0 0]; p = plot(G,'XData',x,'YData',y,'EdgeLabel',G.Edges.Weight);
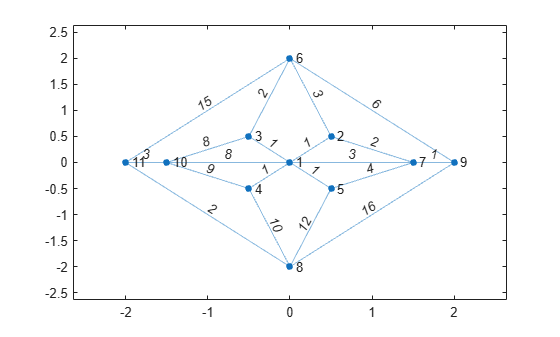
Find the shortest path between nodes 6 and 8 based on the graph edge weights. Highlight this path in green.
[path1,d] = shortestpath(G,6,8)
path1 = 1×5
6 3 1 4 8
d = 14
highlight(p,path1,'EdgeColor','g')
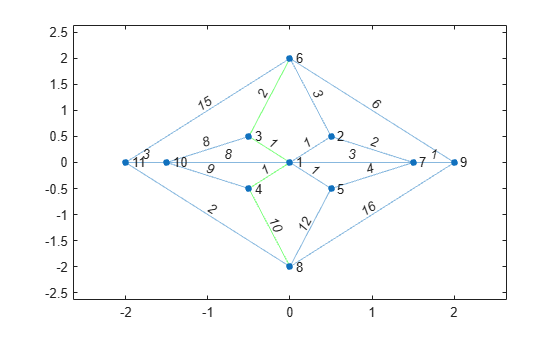
Specify Method as unweighted to ignore the edge weights, instead treating all edges as if they had a weight of 1. This method produces a different path between the nodes, one that previously had too large of a path length to be the shortest path. Highlight this path in red.
[path2,d] = shortestpath(G,6,8,'Method','unweighted')
path2 = 1×3
6 9 8
d = 2
highlight(p,path2,'EdgeColor','r')
Plot the shortest path between two nodes in a multigraph and highlight the specific edges that are traversed.
Create a weighted multigraph with five nodes. Several pairs of nodes have more than one edge between them. Plot the graph for reference.
G = graph([1 1 1 1 1 2 2 3 3 3 4 4],[2 2 2 2 2 3 4 4 5 5 5 2],[2 4 6 8 10 5 3 1 5 6 8 9]);
p = plot(G,'EdgeLabel',G.Edges.Weight);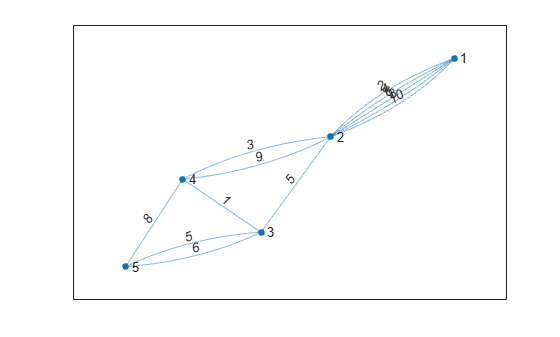
Find the shortest path between node 1 and node 5. Since several of the node pairs have more than one edge between them, specify three outputs to shortestpath to return the specific edges that the shortest path traverses.
[P,d,edgepath] = shortestpath(G,1,5)
P = 1×5
1 2 4 3 5
d = 11
edgepath = 1×4
1 7 9 10
The results indicate that the shortest path has a total length of 11 and follows the edges given by G.Edges(edgepath,:).
G.Edges(edgepath,:)
ans=4×2 table
EndNodes Weight
________ ______
1 2 2
2 4 3
3 4 1
3 5 5
Highlight this edge path by using the highlight function with the 'Edges' name-value pair to specify the indices of the edges traversed.
highlight(p,'Edges',edgepath)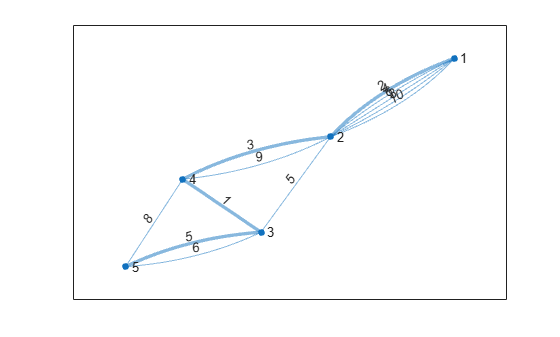
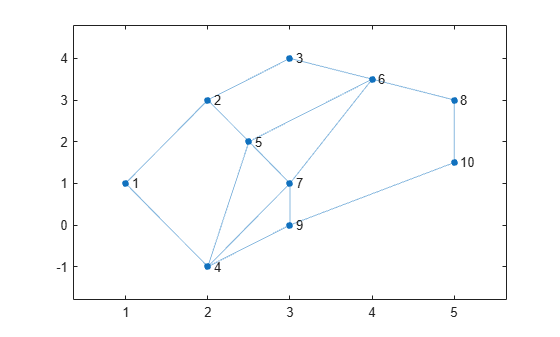
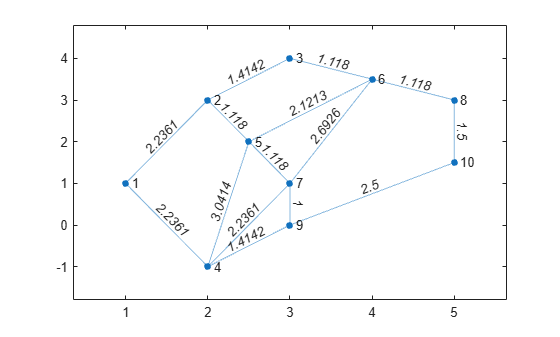
Find the shortest path between nodes in a graph using the distance between the nodes as the edge weights.
Create a graph with 10 nodes.
s = [1 1 2 2 3 4 4 4 5 5 6 6 7 8 9]; t = [2 4 3 5 6 5 7 9 6 7 7 8 9 10 10]; G = graph(s,t);
Create x- and y-coordinates for the graph nodes. Then plot the graph using the node coordinates by specifying the 'XData' and 'YData' name-value pairs.
x = [1 2 3 2 2.5 4 3 5 3 5]; y = [1 3 4 -1 2 3.5 1 3 0 1.5]; plot(G,'XData',x,'YData',y)
Add edge weights to the graph by computing the Euclidean distances between the graph nodes. The distance is calculated from the node coordinates as:
To calculate and , first use findedges to obtain vectors sn and tn describing the source and target nodes of each edge in the graph. Then use sn and tn to index into the x- and y-coordinate vectors and calculate and . The hypot function computes the square root of the sum of squares, so specify and as the input arguments to calculate the length of each edge.
[sn,tn] = findedge(G); dx = x(sn) - x(tn); dy = y(sn) - y(tn); D = hypot(dx,dy);
Add the distances to the graph as the edge weights and replot the graph with the edges labeled.
G.Edges.Weight = D'; p = plot(G,'XData',x,'YData',y,'EdgeLabel',G.Edges.Weight);
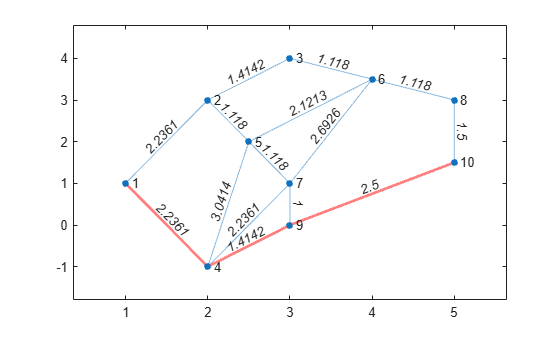
Calculate the shortest path between node 1 and node 10 and specify two outputs to also return the path length. For weighted graphs, shortestpath automatically uses the 'positive' method which considers the edge weights.
[path,len] = shortestpath(G,1,10)
path = 1×4
1 4 9 10
len = 6.1503
Use the highlight function to display the path in the plot.
highlight(p,path,'EdgeColor','r','LineWidth',2)
Input Arguments
Output Arguments
Tips
The
shortestpath,shortestpathtree, anddistancesfunctions do not support undirected graphs with negative edge weights, or more generally any graph containing a negative cycle, for these reasons:A negative cycle is a path that leads from a node back to itself, with the sum of the edge weights on the path being negative. If a negative cycle is on a path between two nodes, then no shortest path exists between the nodes, since a shorter path can always be found by traversing the negative cycle.
A single negative edge weight in an undirected graph creates a negative cycle.
Extended Capabilities
Version History
Introduced in R2015b
See Also
shortestpathtree | distances | nearest | graph | digraph
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)