Simscape Driveline
Model and simulate rotational and translational mechanical systems
Have questions? Contact Sales.
Have questions? Contact Sales.
Simscape Driveline (formerly SimDriveline) provides component libraries for modeling and simulating rotational and translational mechanical systems. It includes models of worm gears, lead screws, and vehicle components such as engines, tires, transmissions, and torque converters. You can use these components to model the transmission of mechanical power in helicopter drivetrains, industrial machinery, automotive powertrains, and other applications. You can integrate electrical, hydraulic, pneumatic, and other physical systems into your model using components from the Simscape family of products.
Simscape Driveline helps you develop control systems and test system-level performance. You can create custom component models with the MATLAB based Simscape language, which enables text-based authoring of physical modeling components, domains, and libraries. You can parameterize your models using MATLAB variables and expressions, and design control systems for your physical system in Simulink. To deploy your models to other simulation environments, including hardware-in-the-loop (HIL) systems, Simscape Driveline supports C-code generation.
Model hybrid, pure electric, and conventional powertrains for passenger, off-road, and custom vehicles. Evaluate vehicle-level performance with losses and thermal effects.

Use templates or assemble custom designs to assess system performance and develop control systems. Switch between detailed and abstract variants to accelerate testing.

Create models tailored to your design to determine loads and design control systems. Perform dynamic and static tests to map system-level requirements to components.

Minimize losses, equipment downtime, and costs by testing designs with degraded component behavior, such as worn gear teeth or increased friction.

Verify system behavior under conditions that cannot be easily tested with hardware prototypes. Run sets of tests in parallel on a multicore workstation or a cluster.

Convert your Simscape model to C code to test control algorithms using HIL tests on dSPACE®, Speedgoat, OPAL-RT, and other real-time systems.

Test integration of electrical, thermal, mechanical, hydraulic, and pneumatic systems in a single environment. Identify integration issues and optimize system-level performance.

Use MATLAB to automate tasks such as model assembly, testing, and post-processing. Use Simulink to integrate control algorithms and hardware design in a single environment.

Use Simscape models to help refine requirements, design control systems, test embedded controllers, and support in-service operation as a digital twin.
The Simscape product family provides models and solver technology for simulating physical systems. Model electrical, mechanical, fluid, and other physical systems by assembling components into a schematic.
Model and simulate multidomain physical systems
Model and simulate electronic, mechatronic, and electrical power systems
Design and simulate battery and energy storage systems
Model and simulate fluid systems
Model and simulate rotational and translational mechanical systems
Model and simulate multibody mechanical systems
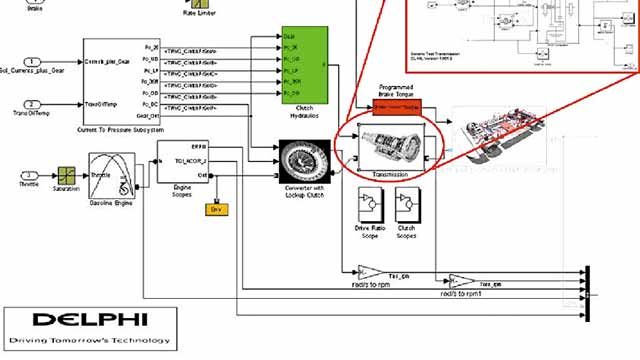
“With Simulink and Simscape Driveline we reduced the time required to build a mechanical model of a transmission by six weeks, and we're positioned to build the next one even faster. As a result, we are better able to support several different customers because we can get into their world much quicker.”
Andrew Herman, Delphi Powertrain Systems
30 days of exploration at your fingertips.
Get pricing information and explore related products.
Your school may already provide access to MATLAB, Simulink, and add-on products through a campus-wide license.
You can also select a web site from the following list
Americas
Europe
Asia Pacific