Pitch Rate Controller Tuning
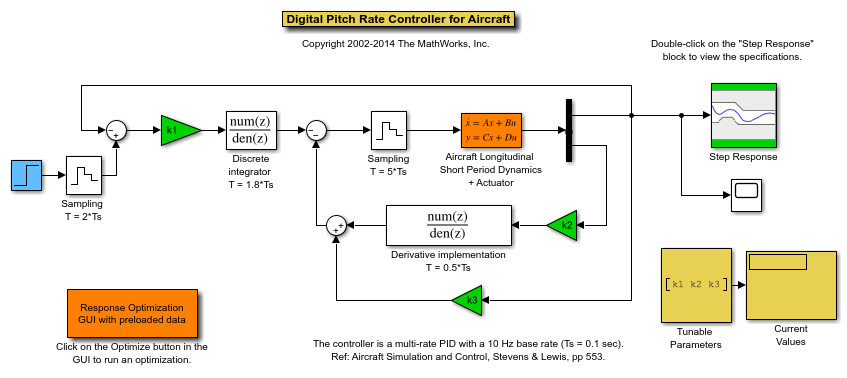
This example shows how to use Simulink® Design Optimization™ to tune the gains of a Digital Pitch Rate Controller and optimize the response of an Aircraft to a step altitude change. The controller includes state derivative and integral feedback. The controller is tuned to satisfy a 10 percent overshoot and 0.9 second rise time step response characteristic.
Open the pitchrate_demo model using the command below and run the simulation. The simulation produces an unoptimized response of the aircraft and the initial data for optimization.
open_system('pitchrate_demo')
Double-click the Scope block to view the unoptimized response of the aircraft.
Double-click the Step Response block to view constraints on the step response of the aircraft.
You can launch the Response Optimizer using the Apps menu in the Simulink toolstrip, or the sdotool command in MATLAB®. You can launch a pre-configured optimization task in Response Optimizer by first opening the model and by double-clicking on the orange block at the bottom of the model. From the Response Optimizer, press the Plot Model Response button to simulate the model and show how well the initial design satisfies the design requirements.

We start the optimization by pressing the Optimize button from the Response Optimizer. The plots are updated to indicate that the design requirements are now satisfied.


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)