Arithmetic Operations on Matrix Signals
This example shows how to perform arithmetic operations on signals carrying matrix and vector data.
In this example, the model performs a series of matrix operations on the input matrices and vectors to transform a system with state-space representation to its controllable canonical form, also known as phase variable form. The phase variable form provides a simplified representation of the system that eases the controllability analysis and helps in model reduction.
The canonicalform model contains the following components that show different mathematical operations.
Input dataMultiplicationInverseCanonical Form
Open the model.
open_system('canonicalform.slx')
Input Data
The Input data component represents the input matrix and vectors in state-space form.
In this example, is 3-by-3 matrix that represents the system, is 3-by-1 input vector, is 3-by-1 output vector, and the model assumes to be 0.

Multiplication
The controllability matrix for the state-space system is defined as:
, where n represents the number of states.
The Multiplication component computes the controllability matrix Q from the state-space system.

Controllable Canonical Form
The model modifies the state-space equation using the substitution and as:
In these equations, , where is the last row of . The Inverse component computes the inverse of the controllability matrix Q and transformation matrix P.

The equation is further simplified as:
where , , and .
The Canonical Form component computes the canonical form of the state-space system.
Simulate the model and visualize , , using Display blocks.
sim('canonicalform.slx');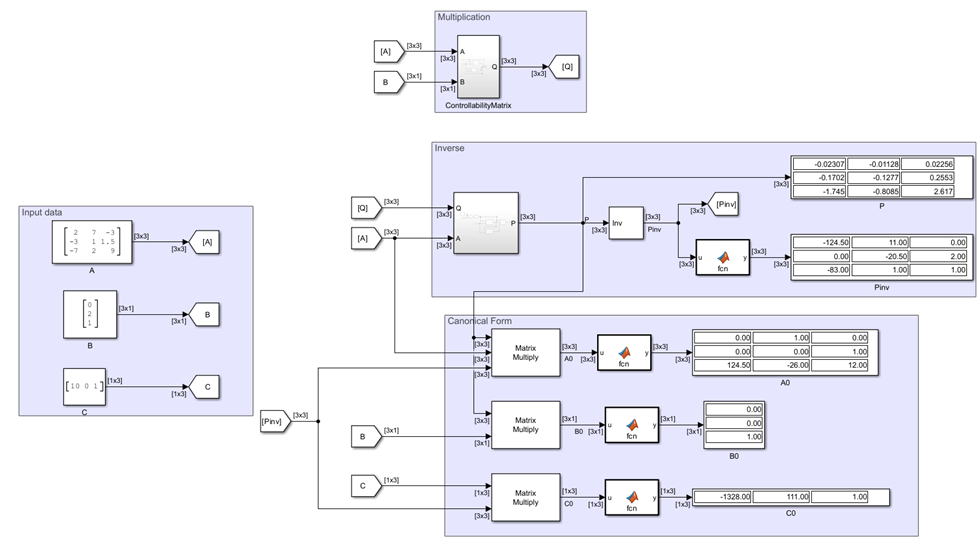
See Also
Product, Matrix Multiply | Divide | Matrix Concatenate | Goto | From | Subsystem
Related Topics
References
[1] Ramaswami, B., and K. Ramar. "Transformation to the phase-variable canonical form."IEEE Transactions on Automatic Control, vol.13, no. 6, Dec. 1968, pp.42-47. DOI.org (Crossref) https://doi.org/10.1109/TAC.1968.1099061.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)